Mobile Robot Path Planning & Tracking in Static and Dynamic Environments
Published research in Robotics and Autonomous Systems on optimal planning and real-time tracking
Overview
This project presents an optimal framework for path planning and tracking of mobile robots. It combines Bellman-based Dynamic Programming for global path planning with Model Predictive Control for real-time tracking. The framework works in both static and dynamic environments, uses map images as input, generates collision-free smooth trajectories, and is designed for real-time use with low computational cost.
Problem Statement
Mobile robots require robust navigation systems that can:
- Navigate safely in environments with static and moving obstacles
- Generate collision-free and smooth paths
- Adapt in real time to dynamic changes
- Maintain tracking accuracy under uncertainty
Many planning methods produce non-smooth or inefficient paths, which makes tracking harder in practice. Dynamic environments add another layer of difficulty because the controller must react quickly to moving obstacles without losing the benefits of the planned optimal route.
Solution Approach
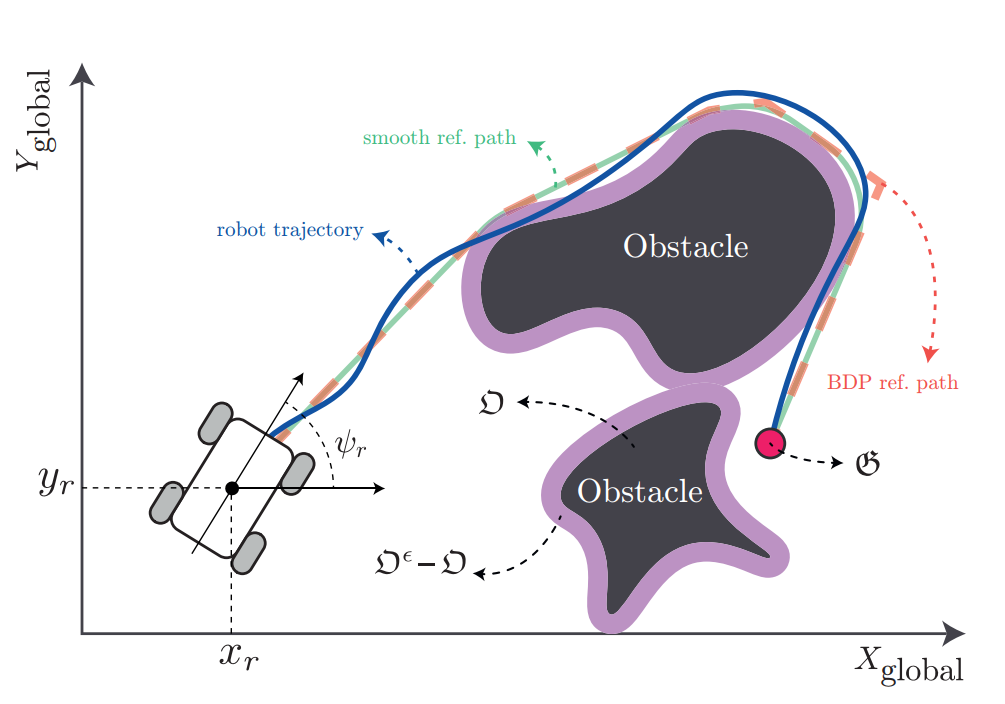
Path Planning
- Grid-based environment modeling using an occupancy grid
- Bellman Dynamic Programming for optimal path search
- Minimum-distance optimization criterion
- Completeness, guaranteeing a path is found if one exists
- Post-processing with a smoothing spline for trajectory feasibility
Path Tracking
- Nonlinear Model Predictive Control for real-time tracking
- Handles robot kinematics and operating constraints
- For dynamic environments, adds an obstacle-avoidance cost term
- Maximizes distance from moving obstacles during control updates
- Real-time optimization using CasADi and IPOPT
Key Features
- Optimal Path Planning: Shortest collision-free path via Dynamic Programming
- Smooth Trajectories: Spline-based post-processing for feasible motion
- Real-Time Control: MPC with fast computation
- Dynamic Obstacle Avoidance: Integrated directly in the control layer
- High Accuracy Tracking: More than 95% tracking performance
- Low Computation Time: Approximately 7 ms per iteration in static scenarios and 21 ms in dynamic scenarios
Results & Validation
- Up to approximately 99% position tracking in static environments
- Approximately 95% to 98% tracking performance in more complex scenarios
- Real-time MPC computation of roughly 7 to 22 ms per iteration
- Validated on multiple complex maps and dynamic obstacle scenarios involving moving humans and objects
- The robot safely avoids moving obstacles without deviating significantly from the optimal path
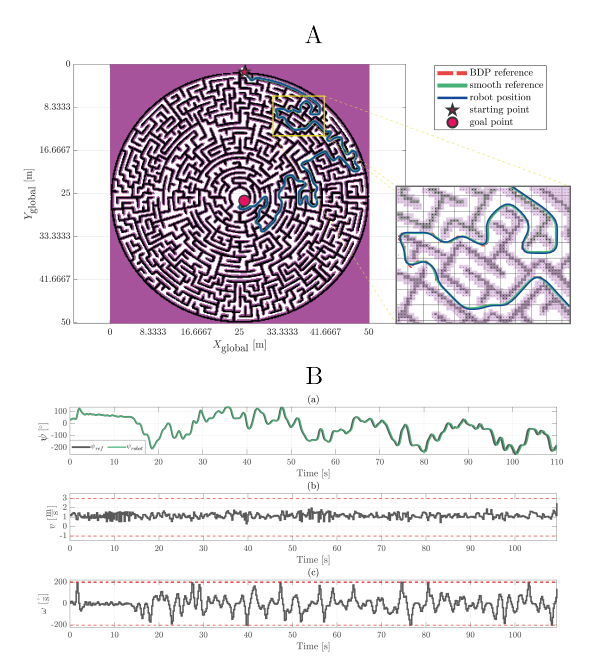
Simulation Highlight: Map (c)
One of the most challenging validation cases in the paper is map (c), where the reference path contains many tight turns and rapid direction changes. Even in this case, the controller tracked the trajectory with high accuracy, reaching 99.559% fit in x, 99.340% fit in y, and 95.439% fit in heading.
The measured controller execution time in this simulation was about 6.2 ms per iteration, supporting real-time applicability. A small heading drift is visible in the result because the robot's angular speed actuator became saturated; in practice, this can be reduced by widening the angular speed limits or increasing the simulation time horizon.
Technical Implementation
- MATLAB for simulation
- CasADi for optimization modeling
- IPOPT solver for nonlinear programming
- Grid-based map processing from images
- Dynamic Programming for planning
- MPC for control